数据分区理论
分布式数据库首先要解决把整个数据集按照分区规则映射到多个节点的问题,即把数据集划分到多个节点上,每个节点负责整体数据的一个子集。
哈希算法
我们可能很快就想到了:哈希算法。因为对同一个关键字进行哈希计算,每次计算都是相同的值,这样就可以将某个 key 确定到一个节点了,可以满足分布式系统的负载均衡需求。
哈希算法最简单的做法就是进行取模运算,比如分布式系统中有 3 个节点,基于 hash(key) % 3 公式对数据进行了映射。
如果客户端要获取指定 key 的数据,通过下面的公式可以定位节点:
1 | hash(key) % 3 |
如果经过上面这个公式计算后得到的值是 0,就说明该 key 需要去第一个节点获取。
扩容问题
如果节点数量发生了变化,也就是在对系统做扩容或者缩容时,必须迁移改变了映射关系的数据,否则会出现查询不到数据的问题。
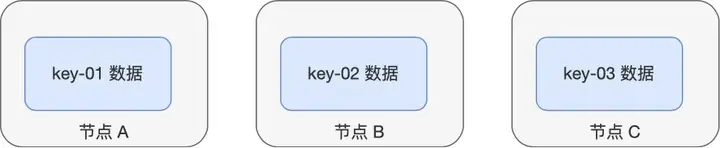
举个例子,假设我们有一个由 A、B、C 三个节点组成分布式 KV 缓存系统,基于计算公式 hash(key) % 3 将数据进行了映射,每个节点存储了不同的数据:
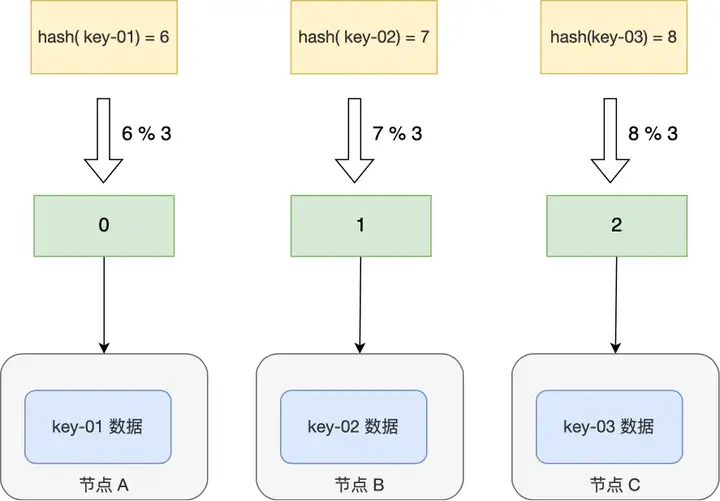
现在有 3 个查询 key 的请求,分别查询 key-01,key-02,key-03 的数据,这三个 key 分别经过 hash() 函数计算后的值为 hash( key-01) = 6、hash( key-02) = 7、hash(key-03) = 8,然后再对这些值进行取模运算。
通过这样的哈希算法,每个 key 都可以定位到对应的节点。
当 3 个节点不能满足业务需求了,这时我们增加了一个节点,节点的数量从 3 变化为 4,意味取模哈希函数中基数的变化,这样会导致大部分映射关系改变,如下图:
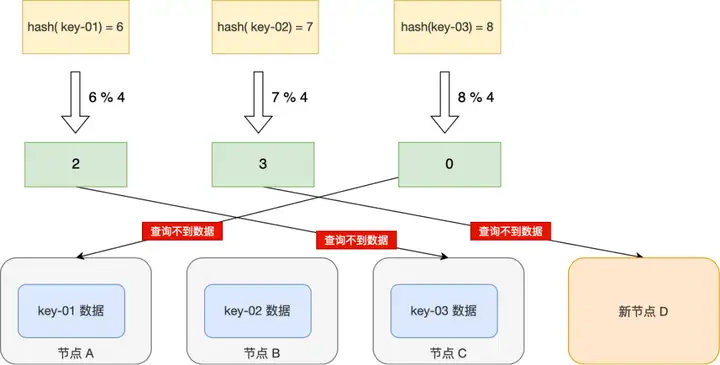
比如,之前的 hash(key-01) % 3 = 0,就变成了 hash(key-01) % 4 = 2,查询 key-01 数据时,寻址到了节点 C,而 key-01 的数据是存储在节点 A 上的,不是在节点 C,所以会查询不到数据。
同样的道理,如果我们对分布式系统进行缩容,比如移除一个节点,也会因为取模哈希函数中基数的变化,可能出现查询不到数据的问题。
要解决这个问题的办法,就需要我们进行迁移数据,比如节点的数量从 3 变化为 4 时,要基于新的计算公式 hash(key) % 4 ,重新对数据和节点做映射。
假设总数据条数为 M,哈希算法在面对节点数量变化时,**最坏情况下所有数据都需要迁移,所以它的数据迁移规模是 O(M)**,这样数据的迁移成本太高了。
所以,我们应该要重新想一个新的算法,来避免分布式系统在扩容或者缩容时,发生过多的数据迁移。
一致性哈希算法
一致性哈希算法就很好地解决了分布式系统在扩容或者缩容时,发生过多的数据迁移的问题。
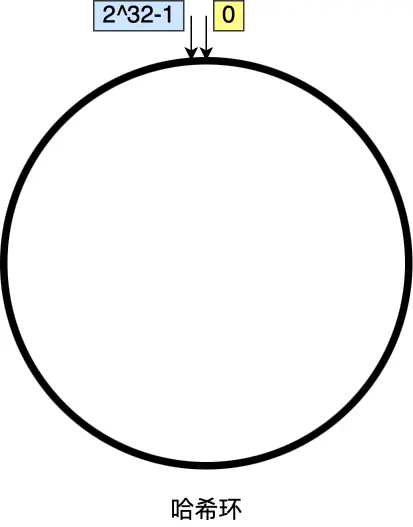
一致哈希算法也用了取模运算,但与哈希算法不同的是,哈希算法是对节点的数量进行取模运算,而一致哈希算法是对 2^32 进行取模运算,是一个固定的值。
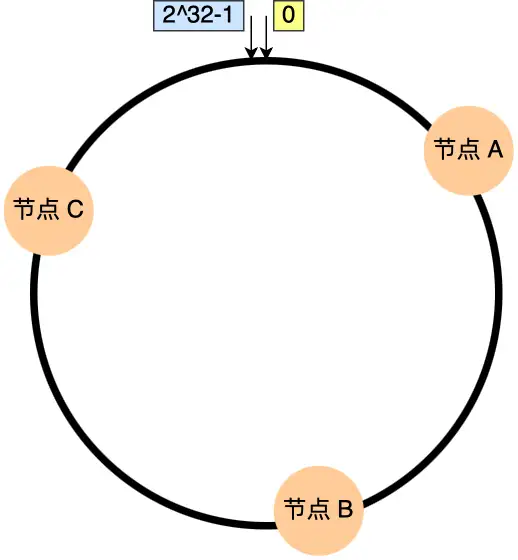
我们可以把一致哈希算法是对 2^32 进行取模运算的结果值组织成一个圆环(hash ring),就像钟表一样,钟表的圆可以理解成由 60 个点组成的圆,而此处我们把这个圆想象成由 2^32 个点组成的圆,这个圆环被称为哈希环,如下图:
一致性哈希要进行两步哈希:
- 第一步:对存储节点进行哈希计算,也就是对存储节点做哈希映射,比如根据节点的 IP 地址进行哈希;
- 第二步:当对数据进行存储或访问时,对数据进行哈希映射;
所以,一致性哈希是指将「存储节点」和「数据」都映射到一个首尾相连的哈希环上。
问题来了,对「数据」进行哈希映射得到一个结果要怎么找到存储该数据的节点呢?
答案是,映射的结果值往顺时针的方向的找到第一个节点,就是存储该数据的节点。
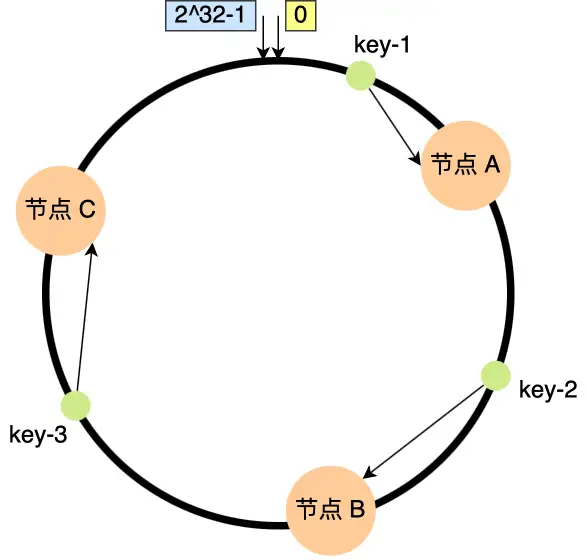
举个例子,有 3 个节点经过哈希计算,映射到了如下图的位置:
接着,对要查询的 key-01 进行哈希计算,确定此 key-01 映射在哈希环的位置,然后从这个位置往顺时针的方向找到第一个节点,就是存储该 key-01 数据的节点。
比如,下图中的 key-01 映射的位置,往顺时针的方向找到第一个节点就是节点 A。
所以,当需要对指定 key 的值进行读写的时候,要通过下面 2 步进行寻址:
- 首先,对 key 进行哈希计算,确定此 key 在环上的位置;
- 然后,从这个位置沿着顺时针方向走,遇到的第一节点就是存储 key 的节点。
扩容问题
知道了一致哈希寻址的方式,我们来看看,如果增加一个节点或者减少一个节点会发生大量的数据迁移吗?
假设节点数量从 3 增加到了 4,新的节点 D 经过哈希计算后映射到了下图中的位置:
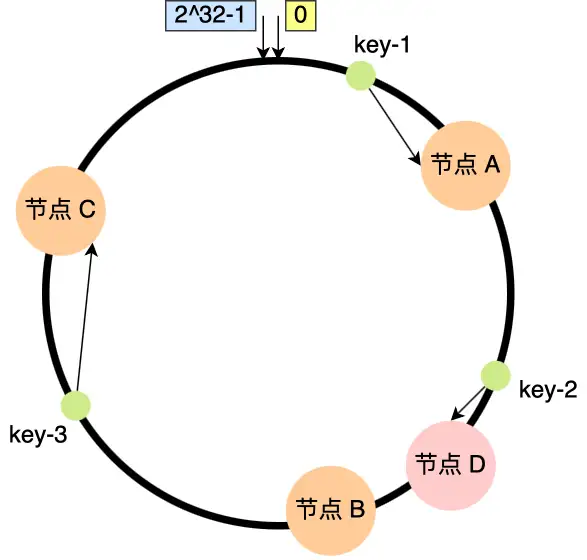
你可以看到,key-01、key-03 都不受影响,只有 key-02 需要被迁移节点 D。
假设节点数量从 3 减少到了 2,比如将节点 A 移除:
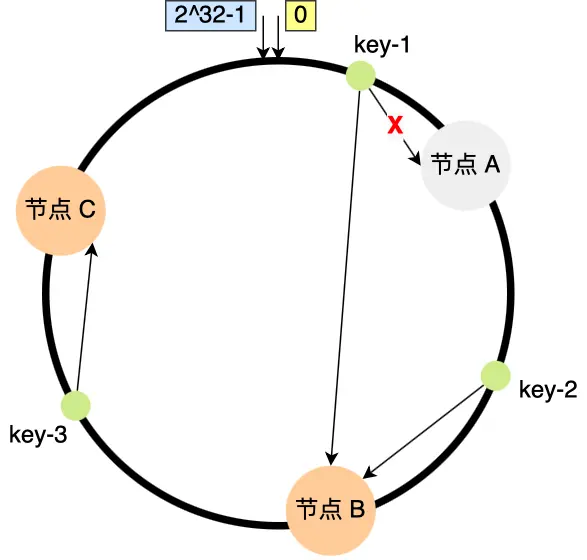
你可以看到,key-02 和 key-03 不会受到影响,只有 key-01 需要被迁移节点 B。
因此,在一致哈希算法中,如果增加或者移除一个节点,仅影响该节点在哈希环上顺时针相邻的后继节点,其它数据也不会受到影响。
上面这些图中 3 个节点映射在哈希环还是比较分散的,所以看起来请求都会「均衡」到每个节点。
但是一致性哈希算法并不保证节点能够在哈希环上分布均匀,这样就会带来一个问题,会有大量的请求集中在一个节点上。
比如,下图中 3 个节点的映射位置都在哈希环的右半边:
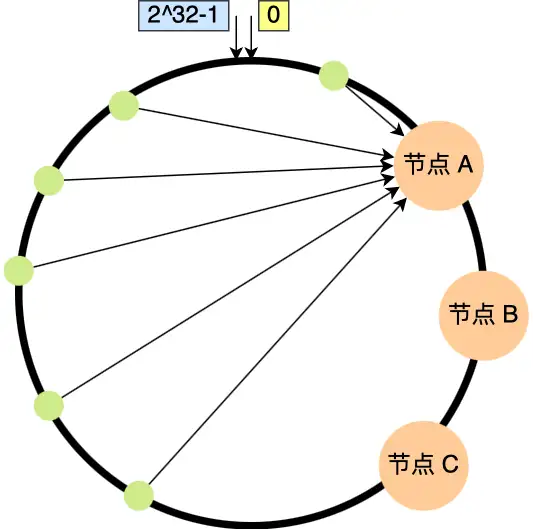
这时候有一半以上的数据的寻址都会找节点 A,也就是访问请求主要集中的节点 A 上,这肯定不行的呀,说好的负载均衡呢,这种情况一点都不均衡。
另外,在这种节点分布不均匀的情况下,进行容灾与扩容时,哈希环上的相邻节点容易受到过大影响,容易发生雪崩式的连锁反应。
比如,上图中如果节点 A 被移除了,当节点 A 宕机后,根据一致性哈希算法的规则,其上数据应该全部迁移到相邻的节点 B 上,这样,节点 B 的数据量、访问量都会迅速增加很多倍,一旦新增的压力超过了节点 B 的处理能力上限,就会导致节点 B 崩溃,进而形成雪崩式的连锁反应。
所以,一致性哈希算法虽然减少了数据迁移量,但是存在节点分布不均匀的问题。
如何通过虚拟节点提高均衡度?
要想解决节点能在哈希环上分配不均匀的问题,就是要有大量的节点,节点数越多,哈希环上的节点分布的就越均匀。
但问题是,实际中我们没有那么多节点。所以这个时候我们就加入虚拟节点,也就是对一个真实节点做多个副本。
具体做法是,不再将真实节点映射到哈希环上,而是将虚拟节点映射到哈希环上,并将虚拟节点映射到实际节点,所以这里有「两层」映射关系。
比如对每个节点分别设置 3 个虚拟节点:
- 对节点 A 加上编号来作为虚拟节点:A-01、A-02、A-03
- 对节点 B 加上编号来作为虚拟节点:B-01、B-02、B-03
- 对节点 C 加上编号来作为虚拟节点:C-01、C-02、C-03
引入虚拟节点后,原本哈希环上只有 3 个节点的情况,就会变成有 9 个虚拟节点映射到哈希环上,哈希环上的节点数量多了 3 倍。
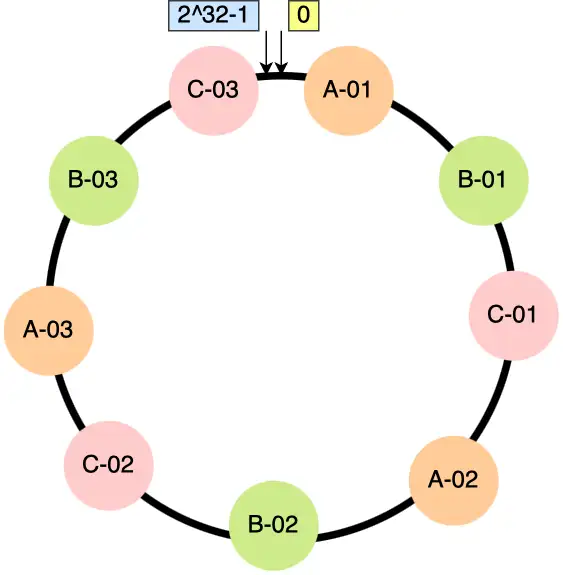
你可以看到,节点数量多了后,节点在哈希环上的分布就相对均匀了。这时候,如果有访问请求寻址到「A-01」这个虚拟节点,接着再通过「A-01」虚拟节点找到真实节点 A,这样请求就能访问到真实节点 A 了。
上面为了方便你理解,每个真实节点仅包含 3 个虚拟节点,这样能起到的均衡效果其实很有限。而在实际的工程中,虚拟节点的数量会大很多,比如 Nginx 的一致性哈希算法,每个权重为 1 的真实节点就含有160 个虚拟节点。
另外,虚拟节点除了会提高节点的均衡度,还会提高系统的稳定性。当节点变化时,会有不同的节点共同分担系统的变化,因此稳定性更高。
比如,当某个节点被移除时,对应该节点的多个虚拟节点均会移除,而这些虚拟节点按顺时针方向的下一个虚拟节点,可能会对应不同的真实节点,即这些不同的真实节点共同分担了节点变化导致的压力。
而且,有了虚拟节点后,还可以为硬件配置更好的节点增加权重,比如对权重更高的节点增加更多的虚拟机节点即可。
因此,带虚拟节点的一致性哈希方法不仅适合硬件配置不同的节点的场景,而且适合节点规模会发生变化的场景。
总结
不同的负载均衡算法适用的业务场景也不同的。
轮训这类的策略只能适用与每个节点的数据都是相同的场景,访问任意节点都能请求到数据。但是不适用分布式系统,因为分布式系统意味着数据水平切分到了不同的节点上,访问数据的时候,一定要寻址存储该数据的节点。
哈希算法虽然能建立数据和节点的映射关系,但是每次在节点数量发生变化的时候,最坏情况下所有数据都需要迁移,这样太麻烦了,所以不适用节点数量变化的场景。
为了减少迁移的数据量,就出现了一致性哈希算法。
一致性哈希是指将「存储节点」和「数据」都映射到一个首尾相连的哈希环上,如果增加或者移除一个节点,仅影响该节点在哈希环上顺时针相邻的后继节点,其它数据也不会受到影响。
但是一致性哈希算法不能够均匀的分布节点,会出现大量请求都集中在一个节点的情况,在这种情况下进行容灾与扩容时,容易出现雪崩的连锁反应。
为了解决一致性哈希算法不能够均匀的分布节点的问题,就需要引入虚拟节点,对一个真实节点做多个副本。不再将真实节点映射到哈希环上,而是将虚拟节点映射到哈希环上,并将虚拟节点映射到实际节点,所以这里有「两层」映射关系。
引入虚拟节点后,可以会提高节点的均衡度,还会提高系统的稳定性。所以,带虚拟节点的一致性哈希方法不仅适合硬件配置不同的节点的场景,而且适合节点规模会发生变化的场景。
Redis集群数据分区
虚拟槽分区
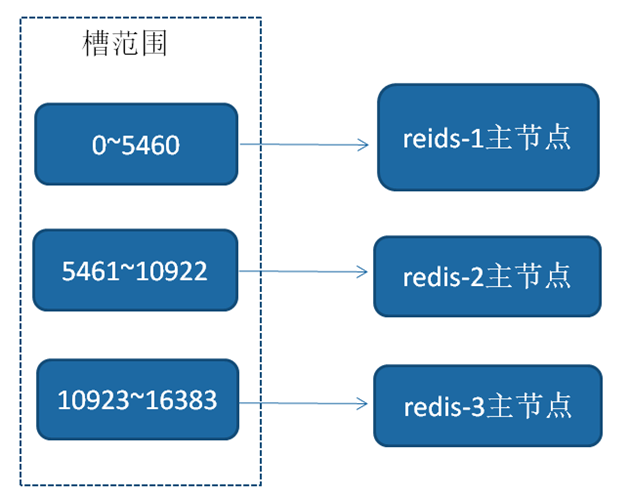
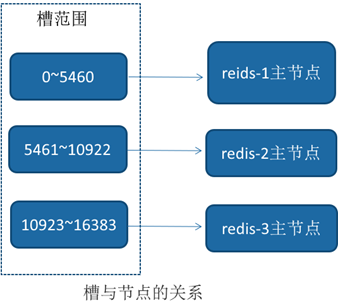
Redis则是利用了虚拟槽分区,可以算上面虚拟一致性哈希分区的变种,它使用分散度良好的哈希函数把所有数据映射到一个固定范围的整数集合中,整数定义为槽( slot)。这个范围一般远远大于节点数,比如RedisCluster槽范围是0 ~16383。槽是集群内数据管理和迁移的基本单位。采用大范围槽的主要目的是为了方便数据拆分和集群扩展。每个节点会负责一定数量的槽。
比如集群有3个节点,则每个节点平均大约负责5460个槽。由于采用高质量的哈希算法,每个槽所映射的数据通常比较均匀,将数据平均划分到5个节点进行数据分区。Redis Cluster就是采用虚拟槽分区,下面就介绍Redis 数据分区方法。
为什么槽的范围是0 ~16383?
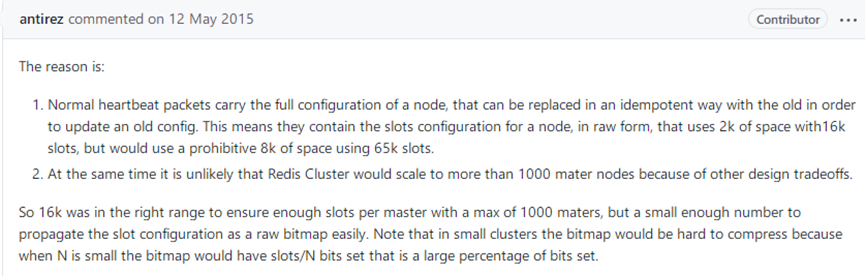
为什么槽的范围是0 ~16383,也就是说槽的个数在16384个?redis的作者在github上有个回答:https://github.com/redis/redis/issues/2576
这个意思是:
Redis集群中,在握手成功后,连个节点之间会定期发送ping/pong消息,交换数据信息,集群中节点数量越多,消息体内容越大,比如说10个节点的状态信息约1kb,同时redis集群内节点,每秒都在发ping消息。例如,一个总节点数为200的Redis集群,默认情况下,这时ping/pong消息占用带宽达到25M。
那么如果槽位为65536,发送心跳信息的消息头达8k,发送的心跳包过于庞大,非常浪费带宽。
其次redis的集群主节点数量基本不可能超过1000个。集群节点越多,心跳包的消息体内携带的数据越多。如果节点过1000个,也会导致网络拥堵。因此redis作者,不建议redis cluster节点数量超过1000个。
那么,对于节点数在1000以内的redis cluster集群,16384个槽位够用了,可以以确保每个 master 有足够的插槽,没有必要拓展到65536个。
再者Redis主节点的配置信息中,它所负责的哈希槽是通过一张bitmap的形式来保存的,在传输过程中,会对bitmap进行压缩,但是如果bitmap的填充率slots / N很高的话(N表示节点数),也就是节点数很少,而哈希槽数量很多的话,bitmap的压缩率就很低,也会浪费资源。
所以Redis作者决定取16384个槽,作为一个比较好的设计权衡。
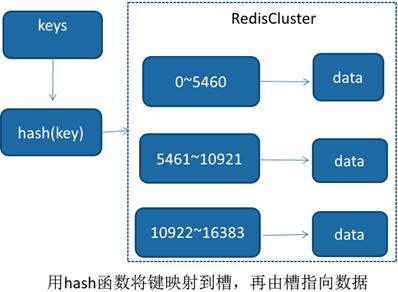
Redis数据分区
Redis Cluser采用虚拟槽分区,所有的键根据哈希函数映射到0 ~16383整数槽内,计算公式:slot=CRC16(key) &16383。每一个节点负责维护―部分槽以及槽所映射的键值数据。
Redis 虚拟槽分区的特点
1、解耦数据和节点之间的关系,简化了节点扩容和收缩难度。
2、节点自身维护槽的映射关系,不需要客户端或者代理服务维护槽分区元数据。口支持节点、槽、键之间的映射查询,用于数据路由、在线伸缩等场景。
3、数据分区是分布式存储的核心,理解和灵活运用数据分区规则对于掌握Redis Cluster非常有帮助。