基本规则
- 每个结点或是红色,或是黑色的。
- 根结点是黑色的。
- 叶结点 (虚构的外部结点、NULL结点) 都是黑色的。
- 不存在两个相邻的红结点(即红结点的父结点和孩子结点均是黑色的)。
- 对每个结点,从该结点到任一叶结点的简单路径上,所含黑结点的数量相同。
简记为:左根右(二叉排序树),根叶黑,不红红,黑路同(黑高相同)
插入规则
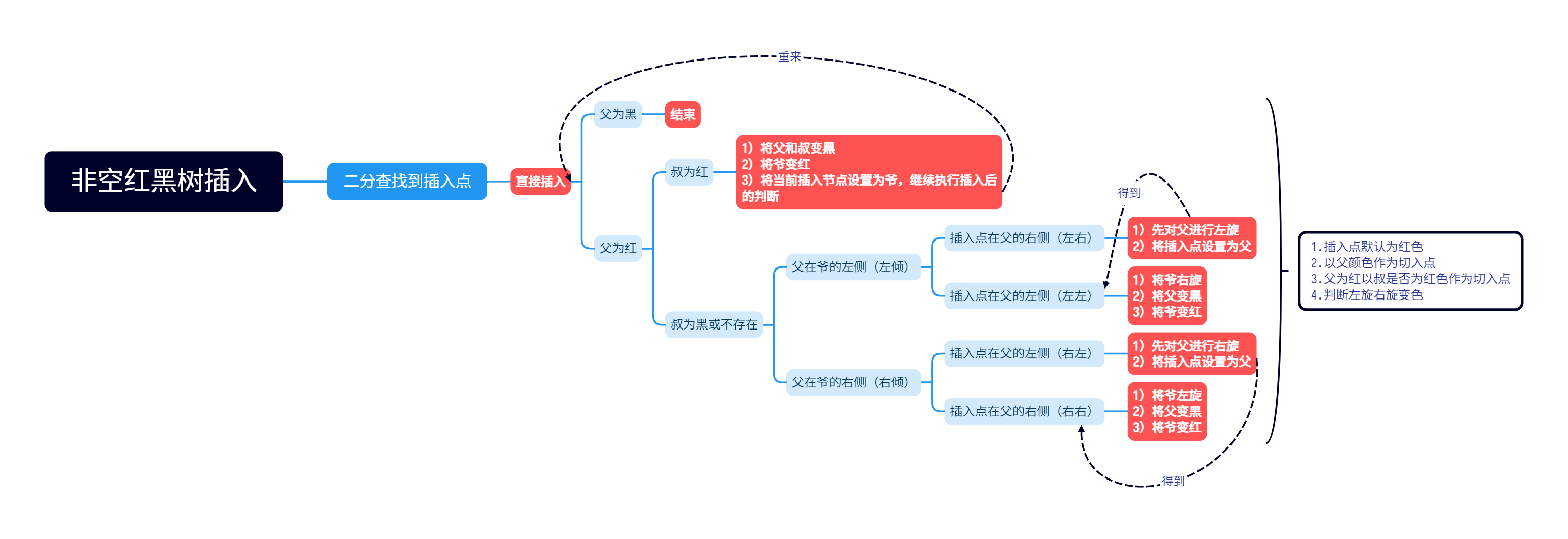
简记为:左根右(二叉排序树),根叶黑,不红红,黑路同(黑高相同)
NVM (Node Version Manager) 使用手册
NVM (Node Version Manager) 是一个用于管理 Node.js 版本的工具,特别方便在项目中需要切换不同 Node.js 版本的情况。以下是 NVM 的基本使用教程:
在 macOS 或 Linux 上,可以通过以下命令安装 NVM:
1 | curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.39.4/install.sh | bash |
Spring Interceptor 与 Filter 的区别
在 Web 应用程序中,Filter和Interceptor都是用于处理请求和响应的重要组件。它们可以在请求处理的不同阶段进行干预,实现诸如身份验证、日志记录、数据过滤等功能。本文将详细介绍 Spring 中Interceptor和Filter的实现方式,帮助您更好地理解和应用这两种技术。
Interceptor和Filter都是 AOP(面向切面编程)的实现方式,但它们有一些区别:
B树(B-Tree)与二叉树(Binary Tree)不是一个概念,其中-是连接符,不是减号,有些人会读成B减树,这是错误的。它可以翻译成Balance Tree,或者是Bayer Tree。
B树是一种自平衡的树,能够保持数据有序。这种数据结构能够让查找数据、顺序访问、插入数据及删除的动作,都在对数时间内完成。
B树与AVL树不同,可以拥有2个以上的子节点,并且每个节点可以有多个键值,这些属性减少了定位记录时所经历的中间过程,加快了存取速度。B树更适用于读写相对较大的数据块存储系统,如磁盘。这种数据结构常被应用在数据库和文件系统的实现上。
迪杰斯特拉(Dijkstra)算法是典型最短路径算法,用于计算一个节点到其他节点的最短路径。
它的主要特点是以起始点为中心向外层层扩展(广度优先搜索思想),直到扩展到终点为止。
基本思想
通过Dijkstra计算图G中的最短路径时,需要指定起点s(即从顶点s开始计算)。
此外,引进两个集合S和U。S的作用是记录已求出最短路径的顶点(以及相应的最短路径长度),而U则是记录还未求出最短路径的顶点(以及该顶点到起点s的距离)。
动态规划(英语:Dynamic programming,简称DP)是一种在数学、管理科学、计算机科学、经济学和生物信息学中使用的,通过把原问题分解为相对简单的子问题的方式求解复杂问题的方法。
动态规划常常适用于有重叠子问题和最优子结构性质的问题,动态规划方法所耗时间往往远少于朴素解法。
动态规划背后的基本思想非常简单。大致上,若要解一个给定问题,我们需要解其不同部分(即子问题),再根据子问题的解以得出原问题的解。
通常许多子问题非常相似,为此动态规划法试图仅仅解决每个子问题一次,从而减少计算量:一旦某个给定子问题的解已经算出,则将其记忆化存储,以便下次需要同一个子问题解之时直接查表。这种做法在重复子问题的数目关于输入的规模呈指数增长时特别有用。
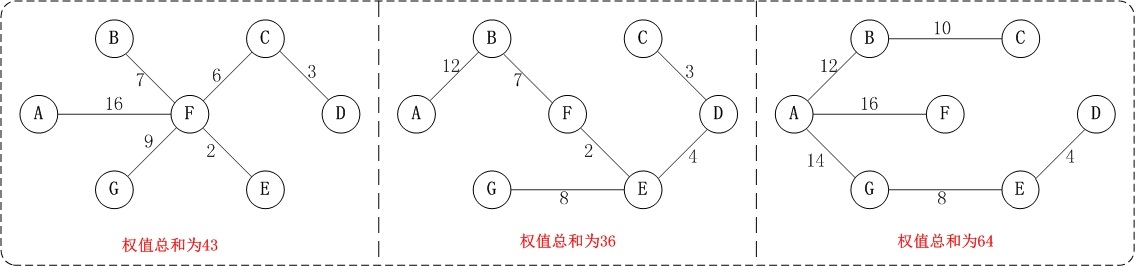
在一个有n个节点的无向连通图G = (V, E)中,V表示顶点集,E表示边集。只需n-1条边就可以使这个图连通,n-1条边要想保证图连通,就必须不含回路,所以我们只需要找出n-1条权值最小且无回路的边即可。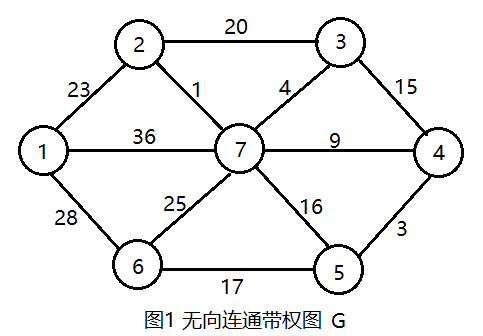
需要明确几个概念:
在含有n个顶点的连通图中选择n-1条边,构成一棵极小连通子图,并使该连通子图中n-1条边上权值之和达到最小,则称其为连通网的最小生成树。
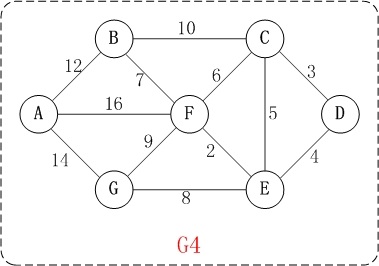
例如,对于如上图G4所示的连通网可以有多棵权值总和不相同的生成树。
背包问题是一种经典的优化问题。有的时候我们需要将有一堆不同重量或者体积的物品放入背包,但是背包容量有限,这时就要寻找一种最优的物品组合,也就是让背包中的物品价值最大化或者重量最小化。
背包问题分为0/1背包问题和分数背包问题。
贪心算法(英语:greedy algorithm),又称贪婪算法,是一种在每一步选择中都采取在当前状态下最好或最优(即最有利)的选择,从而希望导致结果是最好或最优的算法。比如在旅行推销员问题中,如果旅行员每次都选择最近的城市,那这就是一种贪心算法。
贪心算法在有最优子结构的问题中尤为有效。最优子结构的意思是局部最优解能决定全局最优解。简单地说,问题能够分解成子问题来解决,子问题的最优解能递推到最终问题的最优解。
贪心算法与动态规划的不同在于它对每个子问题的解决方案都做出选择,不能回退。动态规划则会保存以前的运算结果,并根据以前的结果对当前进行选择,有回退功能。